По способу создания магнитного потока различают электродвигатели с постоянными магнитами и электромагнитами.
Электродвигатели с постоянными магнитами в силу относительно слабого магнитного потока изготовляют только небольшой мощности. Их используют в системах управления в качестве серводвигателей.
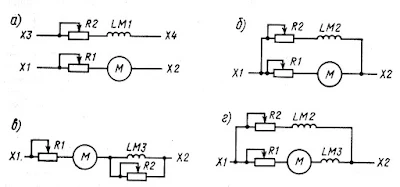
Для привода рабочих машин применяются двигатели с электромагнитами, которые по способу включения обмоток, называемых обмотками возбуждения, подразделяются на двигатели с независимым (рис. 2.1, а), параллельным (рис. 2.1, б), последовательным (рис. 2.1, в) и смешанным (рис. 2.1, г) возбуждением.
Различие между двигателями с независимым и параллельным возбуждением заключается в том, что у первого обмотка возбуждения LM1 и якорь М питаются от различных источников постоянного тока, а у второго LM2 и М — от одного. Напряжение возбуждения у двигателей с независимым возбуждением может быть равным напряжению приложенному к якорю, и отличным от него. У крупных двигателей в большинстве случаев напряжение возбуждения меньше напряжения, приложенного к якорю.
У двигателя с последовательным возбуждением обмотка возбуждения LM3 включена последовательно с якорем М. Напряжение возбуждения меньше напряжения, приложенного к якорю.
Двигатели с параллельным и последовательным возбуждением можно рассматривать как частный случай двигателя со смешанным возбуждением, имеющего 2 обмотки возбуждения LM2 и LM3. В цепь якоря включают пусковой реостат R1, а в цепь возбуждения регулирующий—R2.
Механической характеристикой электродвигателя называется зависимость частоты вращения от вращающего момента на его валу при неизменной схеме включения и постоянных параметрах питающей сети и элементов цепей якоря и возбуждения.
Характеристика называется естественной, если напряжение сети равно нормальному, а сопротивления реостатов R1 и R2 равны нулю (R1 = 0; R2 = 0), в противном случае характеристика называется искусственной.
Аналитическое выражение механической характеристики двигателя может быть получено из соотношений, приведенных в курсе общей электротехники:
 Для этого определим ток якоря
Для этого определим ток якоря
 и, подставив его в формулу для частоты вращения якоря, получим уравнение механической характеристики двигателя:
и, подставив его в формулу для частоты вращения якоря, получим уравнение механической характеристики двигателя:
 При вращающем моменте М = 0
При вращающем моменте М = 0
 т. е. получим частоту вращения идеального холостого хода nx.
т. е. получим частоту вращения идеального холостого хода nx.
У двигателей с независимым и параллельным возбуждением последовательная обмотка отсутствует (см. рис. 2.1, а и б),
 поэтому магнитный поток, если пренебречь реакцией якоря не зависит от тока якоря и при изменении вращающего момента двигателя остается постоянным: Ф = const. Следовательно, для этих двигателей уравнение механической характеристики может быть записано так:
поэтому магнитный поток, если пренебречь реакцией якоря не зависит от тока якоря и при изменении вращающего момента двигателя остается постоянным: Ф = const. Следовательно, для этих двигателей уравнение механической характеристики может быть записано так:
 где b — угловой коэффициент характеристики;
где b — угловой коэффициент характеристики;
 Значение углового коэффициента b можно получить другим путем.
Значение углового коэффициента b можно получить другим путем.
При вращающем моменте заторможенного двигателя М = Мп (М п — пусковой момент двигателя) частота вращения n = 0. Тогда 0 = nx — bМп и угловой коэффициент b = nx/Мп.
В этом случае механическая характеристика будет

Как видно из формул (2.1) и (2.2), механическая характеристика двигателей с независимым и параллельным возбуждением представляет собой прямую линию с угловым коэффициентом b (рис. 2.2, кривая 1), где b = tgβ.
 У двигателя с последовательным возбуждением обмотка возбуждения включена последовательно с обмоткой якоря, поэтому его магнитный поток является функцией тока якоря и механическая характеристика имеет вид гиперболы (кривая 2). При идеальном холостом ходе частота вращения неограниченно увеличивается. У реальных двигателей при номинальном режиме магнитная система близка к насыщению. Это вносит определенные искажения в форму механической характеристики, которая при перегрузках двигателя приближается к прямой линии,поскольку при насыщении магнитный поток становится практически постоянным и не зависит от момента.
У двигателя с последовательным возбуждением обмотка возбуждения включена последовательно с обмоткой якоря, поэтому его магнитный поток является функцией тока якоря и механическая характеристика имеет вид гиперболы (кривая 2). При идеальном холостом ходе частота вращения неограниченно увеличивается. У реальных двигателей при номинальном режиме магнитная система близка к насыщению. Это вносит определенные искажения в форму механической характеристики, которая при перегрузках двигателя приближается к прямой линии,поскольку при насыщении магнитный поток становится практически постоянным и не зависит от момента.
Механическая характеристика двигателя со смешанным возбуждением (кривая 3) занимает промежуточное положение между механическими характеристиками двигателей с параллельным и последовательным возбуждением. У него, как и у двигателей с параллельным и независимым возбуждением, частота вращения идеального холостого хода имеет определенное значение
 где Ф1 — магнитный поток, создаваемый параллельной обмоткой возбуждения.
где Ф1 — магнитный поток, создаваемый параллельной обмоткой возбуждения.
Его механическая характеристика криволинейна вследствие изменения магнитного потока, вызванного влиянием последовательной обмотки возбуждения.
Анализируя механические характеристики электродвигателей постоянного тока с различными способами включения обмоток возбуждения, можно прийти к выводу, что с изменением вращающего момента на валу электродвигателя его частота вращения изменяется незначительно у двигателя с параллельным возбуждением и в большей степени у двигателя с последовательным возбуждением.
Мощность, развиваемая электродвигателем,
 где w — угловая скорость двигателя.
где w — угловая скорость двигателя.
Следовательно, мощность, потребляемая из сети, у двигателя с последовательным возбуждением изменяется меньше.
Поэтому механическую характеристику двигателя с параллельным возбуждением называют жесткой, а характеристику двигателя с последовательным возбуждением — мягкой.
Характеристика двигателя со смешанным возбуждением обладает меньшей жесткостью, чем характеристика двигателя с параллельным возбуждением, но большей, чем характеристика двигателя с последовательным возбуждением.
Электродвигатели с постоянными магнитами в силу относительно слабого магнитного потока изготовляют только небольшой мощности. Их используют в системах управления в качестве серводвигателей.
Для привода рабочих машин применяются двигатели с электромагнитами, которые по способу включения обмоток, называемых обмотками возбуждения, подразделяются на двигатели с независимым (рис. 2.1, а), параллельным (рис. 2.1, б), последовательным (рис. 2.1, в) и смешанным (рис. 2.1, г) возбуждением.
Различие между двигателями с независимым и параллельным возбуждением заключается в том, что у первого обмотка возбуждения LM1 и якорь М питаются от различных источников постоянного тока, а у второго LM2 и М — от одного. Напряжение возбуждения у двигателей с независимым возбуждением может быть равным напряжению приложенному к якорю, и отличным от него. У крупных двигателей в большинстве случаев напряжение возбуждения меньше напряжения, приложенного к якорю.
У двигателя с последовательным возбуждением обмотка возбуждения LM3 включена последовательно с якорем М. Напряжение возбуждения меньше напряжения, приложенного к якорю.
Двигатели с параллельным и последовательным возбуждением можно рассматривать как частный случай двигателя со смешанным возбуждением, имеющего 2 обмотки возбуждения LM2 и LM3. В цепь якоря включают пусковой реостат R1, а в цепь возбуждения регулирующий—R2.
Механической характеристикой электродвигателя называется зависимость частоты вращения от вращающего момента на его валу при неизменной схеме включения и постоянных параметрах питающей сети и элементов цепей якоря и возбуждения.
Характеристика называется естественной, если напряжение сети равно нормальному, а сопротивления реостатов R1 и R2 равны нулю (R1 = 0; R2 = 0), в противном случае характеристика называется искусственной.
Аналитическое выражение механической характеристики двигателя может быть получено из соотношений, приведенных в курсе общей электротехники:



У двигателей с независимым и параллельным возбуждением последовательная обмотка отсутствует (см. рис. 2.1, а и б),



При вращающем моменте заторможенного двигателя М = Мп (М п — пусковой момент двигателя) частота вращения n = 0. Тогда 0 = nx — bМп и угловой коэффициент b = nx/Мп.
В этом случае механическая характеристика будет
Как видно из формул (2.1) и (2.2), механическая характеристика двигателей с независимым и параллельным возбуждением представляет собой прямую линию с угловым коэффициентом b (рис. 2.2, кривая 1), где b = tgβ.

Механическая характеристика двигателя со смешанным возбуждением (кривая 3) занимает промежуточное положение между механическими характеристиками двигателей с параллельным и последовательным возбуждением. У него, как и у двигателей с параллельным и независимым возбуждением, частота вращения идеального холостого хода имеет определенное значение

Его механическая характеристика криволинейна вследствие изменения магнитного потока, вызванного влиянием последовательной обмотки возбуждения.
Анализируя механические характеристики электродвигателей постоянного тока с различными способами включения обмоток возбуждения, можно прийти к выводу, что с изменением вращающего момента на валу электродвигателя его частота вращения изменяется незначительно у двигателя с параллельным возбуждением и в большей степени у двигателя с последовательным возбуждением.
Мощность, развиваемая электродвигателем,

Следовательно, мощность, потребляемая из сети, у двигателя с последовательным возбуждением изменяется меньше.
Поэтому механическую характеристику двигателя с параллельным возбуждением называют жесткой, а характеристику двигателя с последовательным возбуждением — мягкой.
Характеристика двигателя со смешанным возбуждением обладает меньшей жесткостью, чем характеристика двигателя с параллельным возбуждением, но большей, чем характеристика двигателя с последовательным возбуждением.






